Package com.luciad.tea
Contains all classes for terrain elevation analysis.
Most of the functionality in this package relies on interpreting terrain data. This data is provided by
the ALcdTerrainElevationProvider implementations. Most of the algorithms rely on
ILcdMatrixView implementations.
For visibility computations, this package provides the following factory classes:
TLcdP2PCoverageFactoryfor point-to-point intervisibility.TLcdLOSCoverageFactoryfor point-to-area intervisibility.TLcdVisibilityMatrixViewFactoryfor shape-to-shape intervisibility.
TLcdLOSRadarPropagationFunctionto compute visual or radar line-of-sight on an earth modeled as a sphere.TLcdLOSRadarPropagationFunctionSkyBackgroundto compute where one is visible with sky in the background.TLcdLOSPropagationFunctionFixedHeightto compute the visibility at a given height above the ground.
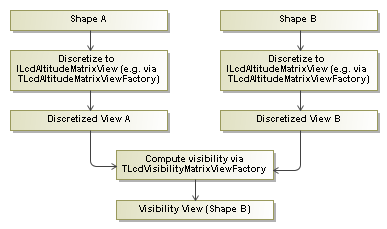
The class TLcdVisibilityMatrixViewFactory defines several methods to compute a shape-to-shape
visibility between two discretized views. The figure below shows how the visibility between two shapes can be
computed. First, the shapes are discretized into ILcdAltitudeMatrixView objects, for example
by using the factory TLcdAltitudeMatrixViewFactory. These objects are then passed to the
TLcdVisibilityMatrixViewFactory which produces a new ILcdVisibilityMatrixView that
provides information on the visibility of the second shape, seen from the first shape. The sample code provides
painters which can be used to visualize the resulting visibility matrix view.
TLcdAltitudeDescriptor
and the TLcdVisibilityDescriptor, is one of the more subtle things that are part of the
visibility computation process, but understanding this aspect is essential to get a valid result at the end of the
process.
The factory TLcdMatrixViewRasterFactory is provided to convert regular matrix views into
ILcdRasters, which can be shown on the map.
The class TLcdExtremePointFinder contains functionality to locate extreme points inside a
given matrix.
- Since:
- 1.5.1
-
ClassDescriptionThis abstract class implements
ILcdAltitudeProvider.A terrain elevation provider that gets its terrain elevation data from a list of models.A terrain elevation provider which adds raster value checking.Provides terrain elevation data.Represents a referenced matrix view containing altitude values.Provides altitude data.Deprecated.Deprecated.UseILcdContourFactoryin the package com.luciad.geometry.cartesian.AnILcdEditableReferencedMatrixViewis anILcdReferencedMatrixViewof which the values and associated points can be set.Represents a referenced editable matrix view containing visibility values.Represents the input and result of a line-of-sight computation.AnILcdPoint2PointIntervisibilityextension to support multiple model references for the input points and rasters.Represents the result of line-of-sight computations.Defines a circular area around a center point, used as input for line-of-sight computations.CombinesILcdEditablePolarMatrixViewandILcdLOSCoverageto represent the input and the results of a line-of-sight computation.Computes values along a given azimuth and stores the result in anILcdLOSCoverageMatrix.Extension of the interfaceILcdLOSPropagationFunctionrepresenting a radar line-of-sight propagation function.Deprecated.UseILcdMatrixViewin com.luciad.shape.Defines the requirements for an object that mapsdoublematrix values toshortraster values.Represents a coverage between two points.Computes the intervisibility between two points.Represents the input and result of a visibility computation between two points.AILcdProfileViewis profile or side-view, for example of a terrain.Adds a reference to the matrix view interface.Represents a referenced matrix view containing visibility values.Describes how special altitude values should be interpreted.Enumeration of interpretations for special altitude values.CreatesILcdAltitudeMatrixViewobjects representing a shape discretization with an altitude value for each discretized point.Deprecated.UseTLcdValuedPolygon.Deprecated.Deprecated.Deprecated.UseTLcdContourUtil.Enumeration to indicate how coverage computation results should be interpreted.An enumeration to indicate which values should be used to fill coverages.This implementation of ALcdTerrainElevationProvider retrieves the elevation from a number of models containing ILcdRaster and/or ILcdMultilevelRaster instances.Enumeration for different earth representations.ILcdFilterimplementation that recognizes models containing terrain elevation data.Finds the extreme (highest or lowest) points from a matrix view.Defines an enumeration that indicates the type of extreme points that should be computed.Returns a fixed altitude value for each point.This implementation of ALcdTerrainElevationProvider retrieves the elevation from a number of Raster or MultiLevelRaster models.This class is the default implementation ofTLcdViewBasedTerrainElevationProviderforILcdGXYViews.This class wraps anILcdHeightProviderto implement theILcdAltitudeProvideinterface.DefaultILcdLOSCoverageimplementation that allows to set the line-of-sight coverage properties.Computes line-of-sight between a point and its surroundings and converts the results to either a raster or a set of polygon contours.Deprecated.use theTLcdLOSCoverageFactoryinstead.Defines a set of options when creating LOS propagation functions.A helper class used to create a new TLcdLOSOptions object.The data type to use to represent the input or result of LOS calculations.The memory mode to be used by internal calculations.Computes the visibility of points at a fixed height from the center point of a line-of-sight coverage.Computes the minimal heights from which one is visible around the center point of a line-of-sight coverage.Wrapper class, enabling multiple step processing of line-of-sight computation results.Computes the minimal heights from which one is visible around the center point of a line-of-sight coverage with the sky as background.ATLcdMatrixis a "regular"ILcdMatrixView, with the x- and y-coordinates are regularly spaced.Creates anILcdRasterfrom anILcdMatrixView.ATLcdP2PCoveragedefines a coverage between two points.Computes the visibility between two points.Deprecated.use theTLcdP2PCoverageFactoryinstead.Computes the intervisibility between the defining points, resulting in one of the following values:TLcdVisibilityStatus.VISIBLE: when the two points are visible to each other.TLcdVisibilityStatus.INVISIBLE: when the two points are invisible to each other.TLcdVisibilityStatus.UNCERTAIN: for points where the intervisibility is unknown.Computes the intervisibility with sky in background between the defining points.Generate terrain profile points for line segments.Implementation ofILcdProfileViewwhich displays the profile in a JPanel.Deprecated.use theTLcdLOSCoverageFactoryinstead.Deprecated.use theTLcdP2PCoverageFactoryinstead.ATLcdRasterMatrixis anILcdMatrixwrapper around a part of anILcdRaster.TLcdShapeAltitudeContext<T extends ILcdShape>Container class around anILcdShapethat provides information on how to interpret the altitude information in the shape.Deprecated.use ALcdTerrainElevationProvider extensions to find retrieve elevation data for points.Utility class to compute the distance between 2 points, taking into account the terrain underneath.AILcdGXYControllerimplementation that contains information on the altitude of terrain beneath the position of the mouse over the view.Deprecated.This class should not be used anymore.Extension ofTLcdAdvancedMapRulerControllerwhich takes into account underlying terrain for distance calculations.This is a utility class for scanning terrain elevation along a line segment.Deprecated.As of 2023.0, this class has been deprecated.This mediator keeps track of terrain models in theILcdViewand adds/removes them to/from the specified model based terrain elevation provider.Describes how special visibility values should be interpreted.Enumeration of interpretations for special visibility values.Creates anILcdVisibilityMatrixViewobject representing the visibility between twoILcdAltitudeMatrixViewobjects.Enumeration representing the result of a visibility computation.Deprecated.As of 2023.0, this class has been deprecated.This class is used for rendering the terrain profile with the use of a Vertical View.
ILcdValuedPolygonin the package com.luciad.shape.