Package com.luciad.tea
Class TLcdLOSRadarPropagationFunction
java.lang.Object
com.luciad.tea.TLcdLOSRadarPropagationFunction
- All Implemented Interfaces:
ILcdLOSPropagationFunction,ILcdLOSRadarPropagationFunction
public class TLcdLOSRadarPropagationFunction
extends Object
implements ILcdLOSRadarPropagationFunction
Computes the minimal heights from which one is visible around the center point of a line-of-sight
coverage. These heights are assigned along the given azimuth and stored in the polar matrix view.
The visibility of a point is limited by the terrain, represented by the terrain elevation provider
and by the cone of silence, represented by the minimum and maximum angle in the vertical direction.
The area between these angles holds the visual field for the given azimuth. Both angles start from
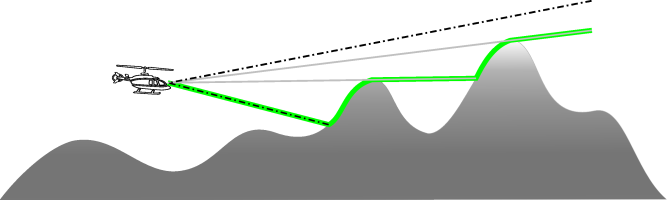
0 at the ground to 180 at zenith.
The propagation function supports both radar and visual line-of-sight computations. The K-factor
in the constructor is an indication of the reflection of the waves on the atmosphere. For radar
line-of-sight computations, values should be greater than 1, usually 4/3.
For visual line-of-sight computations the value should be equal to 1.
The matrix resulting from this propagation function can contain the following special values:
ILcdLOSRadarPropagationFunction.INVISIBLE: for points where the object is invisible.ILcdLOSRadarPropagationFunction.UNKNOWN: for points where the visibility is unknown. For example when no elevation data or invalid data was found at that point.
-
Field Summary
Fields inherited from interface com.luciad.tea.ILcdLOSRadarPropagationFunction
INVISIBLE, UNKNOWN -
Constructor Summary
ConstructorsConstructorDescriptionTLcdLOSRadarPropagationFunction(TLcdEarthRepresentationMode aEarthRepresentationMode, ALcdTerrainElevationProvider aTerrainElevationProvider, TLcdCoverageAltitudeMode aAltitudeMode, double aMinVerticalAngle, double aMaxVerticalAngle, double aKFactor) Creates a propagation function which computes the minimal height from which one is visible from the center point of a circular area.TLcdLOSRadarPropagationFunction(TLcdEarthRepresentationMode aEarthRepresentationMode, ALcdTerrainElevationProvider aTerrainElevationProvider, TLcdCoverageAltitudeMode aAltitudeMode, double aMinVerticalAngle, double aMaxVerticalAngle, double aMaxRadarTiltAngle, double aMaxRadarTiltAzimuth, double aKFactor) Creates a propagation function which computes the minimal height from which one is visible from the center point of a circular area.TLcdLOSRadarPropagationFunction(TLcdEarthRepresentationMode aEarthRepresentationMode, ALcdTerrainElevationProvider aTerrainElevationProvider, TLcdCoverageAltitudeMode aAltitudeMode, double aMinVerticalAngle, double aMaxVerticalAngle, double aMaxRadarTiltAngle, double aMaxRadarTiltAzimuth, double aKFactor, TLcdLOSOptions aLOSOption) Creates a propagation function which computes the minimal height from which one is visible from the center point of a circular area. -
Method Summary
Modifier and TypeMethodDescriptionvoidapplyForAzimuthSFCT(double aAzimuth, ILcdLOSCoverageMatrix aLOSCoverageMatrixSFCT) Computes the minimal heights from which one is visible around the center point of a line-of-sight coverage for a given azimuth and stores the resulting heights in the line-of-sight coverage matrix.createLOSCoverageMatrix(ILcdLOSCoverage aLOSCoverage, ILcdGeoReference aMatrixReference) Creates a coverage matrix using the line-of-sight coverageaLOSCoverageand the matrix referenceaMatrixReference.Returns the altitude mode indicating the definition of the resulting line-of-sight values.Returns the earth representation mode used by this instance.doubleReturns the K-factor indicating the reflection of radar waves on the atmosphere.doubleReturns the maximum radar tilt angle in degrees, starting from 0 at the horizontal plane to 90 at zenith.doubleReturns the azimuth in degrees where the maximum radar tilt angle occurs.doubleReturns the maximum angle of the vertical extent in degrees, starting from 0 at the ground to 180 at zenith.doubleReturns the minimum angle of the vertical extent in degrees, starting from 0 at the ground to 180 at zenith.Returns the elevation provider used to retrieve the terrain elevation data.voidinitialize(ILcdLOSCoverage aLOSCoverage, ILcdGeoReference aMatrixReference) Initialize the propagation function with the given coverageaLOSCoverageand the given matrix referenceaMatrixReference.
-
Constructor Details
-
TLcdLOSRadarPropagationFunction
public TLcdLOSRadarPropagationFunction(TLcdEarthRepresentationMode aEarthRepresentationMode, ALcdTerrainElevationProvider aTerrainElevationProvider, TLcdCoverageAltitudeMode aAltitudeMode, double aMinVerticalAngle, double aMaxVerticalAngle, double aKFactor) Creates a propagation function which computes the minimal height from which one is visible from the center point of a circular area. Note that the terrain elevation provider cannot be set tonull, otherwise aNullPointerExceptionwill be thrown. Currently, two earth representation modes are supported. If another representation mode is used, anIllegalArgumentExceptionwill be thrown. The radar tilt angle is set to zero, meaning that the radar scans in a horizontal plane, the minimum and maximum viewing angles are constant independent of the viewing direction.- Parameters:
aEarthRepresentationMode- The mode indicating which earth representation to use.aTerrainElevationProvider- The terrain elevation provider.aAltitudeMode- The altitude mode indicating the definition of the resulting values.aMinVerticalAngle- The minimum angle of the vertical extent in degrees, starting from 0 at the ground to 180 at zenith. It is the minimum vertical angle when the radar tilt angle is set to zero.aMaxVerticalAngle- The maximum angle of the vertical extent in degrees, starting from 0 at the ground to 180 at zenith. It is the maximum vertical angle when the radar tilt angle is set to zero.aKFactor- A factor indicating the reflection of radar waves on the atmosphere. For radar computations, values should be greater than 1, usually 4/3. Setting the value equal to 1 will yield the same results as visual line-of-sight computations.- Throws:
NullPointerException- when the argumentaTerrainElevationProviderisnull.IllegalArgumentException-- if the argument
aEarthRepresentationModeis not one of the following expected values (TLcdEarthRepresentationMode.SPHERICAL_FIXED_RADIUSorTLcdEarthRepresentationMode.SPHERICAL_EULER_RADIUS, - if the
aAltitudeModeisTLcdCoverageAltitudeMode.ABOVE_OBJECT, - if the argument
aMinVerticalAngleoraMaxVerticalAnglelies outside the interval [0, 180] and - if the argument
aKFactoris smaller than or equal to zero.
- if the argument
-
TLcdLOSRadarPropagationFunction
public TLcdLOSRadarPropagationFunction(TLcdEarthRepresentationMode aEarthRepresentationMode, ALcdTerrainElevationProvider aTerrainElevationProvider, TLcdCoverageAltitudeMode aAltitudeMode, double aMinVerticalAngle, double aMaxVerticalAngle, double aMaxRadarTiltAngle, double aMaxRadarTiltAzimuth, double aKFactor) Creates a propagation function which computes the minimal height from which one is visible from the center point of a circular area. Note that the terrain elevation provider cannot be set tonull, otherwise aNullPointerExceptionwill be thrown. Currently, two earth representation modes are supported. If another representation mode is used, anIllegalArgumentExceptionwill be thrown.TLcdEarthRepresentationMode.SPHERICAL_FIXED_RADIUSTLcdEarthRepresentationMode.SPHERICAL_EULER_RADIUS
applyForAzimuthSFCT(double, ILcdLOSCoverageMatrix). If the computed viewing angle falls outside the viewing interval [0, 180], the angle outside the interval is clipped to either0or180.- Parameters:
aEarthRepresentationMode- The mode indicating which earth representation to use.aTerrainElevationProvider- The terrain elevation provider.aAltitudeMode- The altitude mode indicating the definition of the resulting values.aMinVerticalAngle- The minimum angle of the vertical extent in degrees, starting from 0 at the ground to 180 at zenith. It is the minimum vertical angle when the radar tilt angle is set to zero.aMaxVerticalAngle- The maximum angle of the vertical extent in degrees, starting from 0 at the ground to 180 at zenith. It is the maximum vertical angle when the radar tilt angle is set to zero.aMaxRadarTiltAngle- The maximum radar tilt angle in degrees, starting from 0 at the horizontal plane to 90 at zenith.aMaxRadarTiltAzimuth- The azimuth in degrees where the maximum radar tilt angle occurs.aKFactor- A factor indicating the reflection of radar waves on the atmosphere. For radar computations, values should be greater than 1, usually 4/3. If equal to 1 this will produce the same result as direct line-of-sight computations.- Throws:
NullPointerException- when the argumentaTerrainElevationProviderisnull.IllegalArgumentException-- if the argument
aEarthRepresentationModeis not one of the following expected values (TLcdEarthRepresentationMode.SPHERICAL_FIXED_RADIUSorTLcdEarthRepresentationMode.SPHERICAL_EULER_RADIUS, - if the
aAltitudeModeisTLcdCoverageAltitudeMode.ABOVE_OBJECT, - if the argument
aMinVerticalAngleoraMaxVerticalAnglelies outside the interval [0, 180], - if the argument
aMaxRadarTiltAnglelies outside the interval [0, 90] and - if the argument
aKFactoris smaller than or equal to zero.
- if the argument
-
TLcdLOSRadarPropagationFunction
public TLcdLOSRadarPropagationFunction(TLcdEarthRepresentationMode aEarthRepresentationMode, ALcdTerrainElevationProvider aTerrainElevationProvider, TLcdCoverageAltitudeMode aAltitudeMode, double aMinVerticalAngle, double aMaxVerticalAngle, double aMaxRadarTiltAngle, double aMaxRadarTiltAzimuth, double aKFactor, TLcdLOSOptions aLOSOption) Creates a propagation function which computes the minimal height from which one is visible from the center point of a circular area. Note that the terrain elevation provider cannot be set tonull, otherwise aNullPointerExceptionwill be thrown. Currently, two earth representation modes are supported. If another representation mode is used, anIllegalArgumentExceptionwill be thrown.TLcdEarthRepresentationMode.SPHERICAL_FIXED_RADIUSTLcdEarthRepresentationMode.SPHERICAL_EULER_RADIUS
applyForAzimuthSFCT(double, ILcdLOSCoverageMatrix). If the computed viewing angle falls outside the viewing interval [0, 180], the angle outside the interval is clipped to either0or180.- Parameters:
aEarthRepresentationMode- The mode indicating which earth representation to use.aTerrainElevationProvider- The terrain elevation provider.aAltitudeMode- The altitude mode indicating the definition of the resulting values.aMinVerticalAngle- The minimum angle of the vertical extent in degrees, starting from 0 at the ground to 180 at zenith. It is the minimum vertical angle when the radar tilt angle is set to zero.aMaxVerticalAngle- The maximum angle of the vertical extent in degrees, starting from 0 at the ground to 180 at zenith. It is the maximum vertical angle when the radar tilt angle is set to zero.aMaxRadarTiltAngle- The maximum radar tilt angle in degrees, starting from 0 at the horizontal plane to 90 at zenith.aMaxRadarTiltAzimuth- The azimuth in degrees where the maximum radar tilt angle occurs.aKFactor- A factor indicating the reflection of radar waves on the atmosphere. For radar computations, values should be greater than 1, usually 4/3. If equal to 1 this will produce the same result as direct line-of-sight computations.aLOSOption- A LOS option object containing parameters for the internals of this propagation function and its resulting coverages- Throws:
NullPointerException- when the argumentaTerrainElevationProviderisnull.IllegalArgumentException-- if the argument
aEarthRepresentationModeis not one of the following expected values (TLcdEarthRepresentationMode.SPHERICAL_FIXED_RADIUSorTLcdEarthRepresentationMode.SPHERICAL_EULER_RADIUS, - if the
aAltitudeModeisTLcdCoverageAltitudeMode.ABOVE_OBJECT, - if the argument
aMinVerticalAngleoraMaxVerticalAnglelies outside the interval [0, 180], - if the argument
aMaxRadarTiltAnglelies outside the interval [0, 90] and - if the argument
aKFactoris smaller than or equal to zero.
- if the argument
-
-
Method Details
-
createLOSCoverageMatrix
public ILcdLOSCoverageMatrix createLOSCoverageMatrix(ILcdLOSCoverage aLOSCoverage, ILcdGeoReference aMatrixReference) Description copied from interface:ILcdLOSPropagationFunctionCreates a coverage matrix using the line-of-sight coverageaLOSCoverageand the matrix referenceaMatrixReference. The result of this method is used as input parameter for the methodapplyForAzimuthSFCT, which will store the actual matrix values. The matrix should be consistent with the given coverage. This means that all matrix rows and columns represent evenly spaced radii and azimuths as defined by the radial and angular step sizes of the line-of-sight coverage. The methodILcdLOSPropagationFunction.initialize(com.luciad.tea.ILcdLOSCoverage, com.luciad.reference.ILcdGeoReference)is called with the same arguments as supplied with this method.The
ILcdLOSCoverageMatrixcreated by this method is guaranteed to be capable of determining its own associatedPointX and associatedPointY properties. These values are not calculated by thisILcdPropagationFunction. AnILcdLOSPropagationFunctiondoes not modify the values of the associatedPointX and associatedPointY for its createdILcdLOSCoverageMatrix.- Specified by:
createLOSCoverageMatrixin interfaceILcdLOSPropagationFunction- Parameters:
aLOSCoverage- The covered area and the intermediate step sizes.aMatrixReference- The reference in which this matrix is defined.- Returns:
- the created coverage matrix.
-
initialize
Description copied from interface:ILcdLOSPropagationFunctionInitialize the propagation function with the given coverageaLOSCoverageand the given matrix referenceaMatrixReference. For performance reasons, it is recommended that this method initializes all fields that are common to all computations or which do not depend on a specific azimuth.- Specified by:
initializein interfaceILcdLOSPropagationFunction- Parameters:
aLOSCoverage- The covered area to use.aMatrixReference- The matrix reference in which to compute the matrix values.
-
applyForAzimuthSFCT
Computes the minimal heights from which one is visible around the center point of a line-of-sight coverage for a given azimuth and stores the resulting heights in the line-of-sight coverage matrix. Note that this implementation assumes that the default value of a matrix entry corresponds to the value for invisible points (which isILcdLOSRadarPropagationFunction.INVISIBLE). Refer to the class documentation for more information about the different special values.- Specified by:
applyForAzimuthSFCTin interfaceILcdLOSPropagationFunction- Parameters:
aAzimuth- The azimuth in degrees.aLOSCoverageMatrixSFCT- The coverage matrix to update.- Throws:
NullPointerException- if the aLOSCoverageMatrixSFCT isnull.
-
getEarthRepresentationMode
Description copied from interface:ILcdLOSRadarPropagationFunctionReturns the earth representation mode used by this instance.- Specified by:
getEarthRepresentationModein interfaceILcdLOSRadarPropagationFunction- Returns:
- the earth representation mode used by this instance.
-
getAltitudeMode
Description copied from interface:ILcdLOSRadarPropagationFunctionReturns the altitude mode indicating the definition of the resulting line-of-sight values.- Specified by:
getAltitudeModein interfaceILcdLOSRadarPropagationFunction- Returns:
- the altitude mode indicating the definition of the resulting line-of-sight values.
-
getKFactor
public double getKFactor()Description copied from interface:ILcdLOSRadarPropagationFunctionReturns the K-factor indicating the reflection of radar waves on the atmosphere. For radar computations, values should be greater than 1, usually 4/3. Setting the value equal to 1 will yield the same results as visual line-of-sight computations.- Specified by:
getKFactorin interfaceILcdLOSRadarPropagationFunction- Returns:
- the K-factor indicating the reflection of radar waves on the atmosphere.
-
getMaxVerticalAngle
public double getMaxVerticalAngle()Description copied from interface:ILcdLOSRadarPropagationFunctionReturns the maximum angle of the vertical extent in degrees, starting from 0 at the ground to 180 at zenith. It is the maximum vertical angle when the radar tilt angle is set to zero.- Specified by:
getMaxVerticalAnglein interfaceILcdLOSRadarPropagationFunction- Returns:
- the maximum angle of the vertical extent in degrees.
-
getMinVerticalAngle
public double getMinVerticalAngle()Description copied from interface:ILcdLOSRadarPropagationFunctionReturns the minimum angle of the vertical extent in degrees, starting from 0 at the ground to 180 at zenith. It is the minimum vertical angle when the radar tilt angle is set to zero.- Specified by:
getMinVerticalAnglein interfaceILcdLOSRadarPropagationFunction- Returns:
- the minimum angle of the vertical extent in degrees.
-
getMaxRadarTiltAngle
public double getMaxRadarTiltAngle()Description copied from interface:ILcdLOSRadarPropagationFunctionReturns the maximum radar tilt angle in degrees, starting from 0 at the horizontal plane to 90 at zenith.- Specified by:
getMaxRadarTiltAnglein interfaceILcdLOSRadarPropagationFunction- Returns:
- the maximum radar tilt angle in degrees.
-
getMaxRadarTiltAzimuth
public double getMaxRadarTiltAzimuth()Description copied from interface:ILcdLOSRadarPropagationFunctionReturns the azimuth in degrees where the maximum radar tilt angle occurs.- Specified by:
getMaxRadarTiltAzimuthin interfaceILcdLOSRadarPropagationFunction- Returns:
- the azimuth in degrees where the maximum radar tilt angle occurs.
-
getTerrainElevationProvider
Description copied from interface:ILcdLOSRadarPropagationFunctionReturns the elevation provider used to retrieve the terrain elevation data.- Specified by:
getTerrainElevationProviderin interfaceILcdLOSRadarPropagationFunction- Returns:
- the elevation provider used to retrieve the terrain elevation data.
-