Package com.luciad.tea
Interface ILcdLOSRadarPropagationFunction
- All Superinterfaces:
ILcdLOSPropagationFunction
- All Known Implementing Classes:
TLcdLOSRadarPropagationFunction,TLcdLOSRadarPropagationFunctionCoverageMatrixWrapper,TLcdLOSRadarPropagationFunctionSkyBackground
Extension of the interface
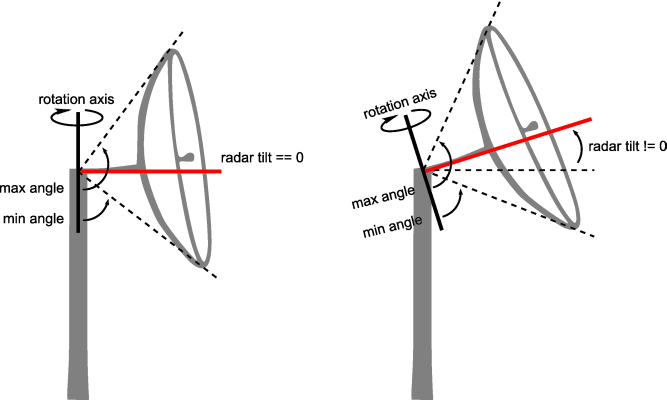
Keep in mind that, if the radar tilt angle is not zero, the minimum and maximum viewing angles
should be recomputed in the method
Note that these cases are only an issue when the corresponding azimuths lies inside the area on
which this radar propagation function will be applied. This area is defined by the line-of-sight
coverage (
ILcdLOSPropagationFunction representing a radar line-of-sight
propagation function. It adds some property methods that can be used by the propagation functions
which are based on a radar line-of-sight computation.
The matrix resulting from this propagation function can contain the following special values:
INVISIBLE: for points where the object is invisible.UNKNOWN: for points where the visibility is unknown. For example when no elevation data or invalid data was found at that point.
ILcdLOSPropagationFunction.applyForAzimuthSFCT(double, ILcdLOSCoverageMatrix).
In some cases, the computed viewing angle might fall outside the viewing interval [0, 180]. The
implementation of this interface should handle these special cases correctly. The viewing angle
is usually clipped to 0 or 180.
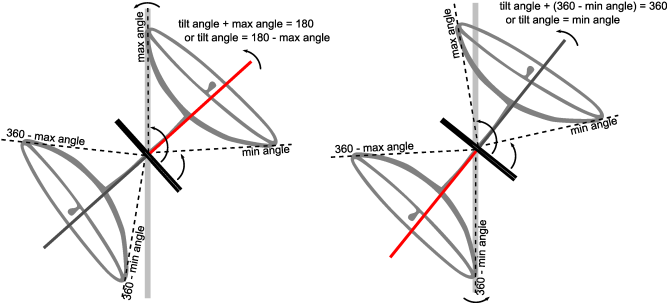
There are two cases when a viewing angle can fall outside the viewing interval. They are both
explained using the image below. Both drawings show on the top-right part the viewing angles as
dotted lines for the azimuth aMaxRadarTiltAzimuth and on the bottom-left part for
the azimuth aMaxRadarTiltAzimuth + 180. The red lines correspond to the radar tilt
angle for the azimuth.
- case 1: when the maximum viewing angle becomes larger than
180degrees. In the left drawing, the radar tilt angle is chosen to make the maximum viewing angle fall on the180degree line. A larger radar tilt angle makes the maximum viewing angle fall outside the viewing interval [0, 180]. - case 2: when the minimum viewing angle becomes smaller than
0degrees. In the right drawing, the radar tilt angle is chosen to make the minimum viewing angle fall on the0degree line. Larger radar tilt angles make the minimum viewing angle fall outside the viewing interval [0, 180].
TLcdLOSCoverage).- See Also:
-
Field Summary
Fields -
Method Summary
Modifier and TypeMethodDescriptionReturns the altitude mode indicating the definition of the resulting line-of-sight values.Returns the earth representation mode used by this instance.doubleReturns the K-factor indicating the reflection of radar waves on the atmosphere.doubleReturns the maximum radar tilt angle in degrees, starting from 0 at the horizontal plane to 90 at zenith.doubleReturns the azimuth in degrees where the maximum radar tilt angle occurs.doubleReturns the maximum angle of the vertical extent in degrees, starting from 0 at the ground to 180 at zenith.doubleReturns the minimum angle of the vertical extent in degrees, starting from 0 at the ground to 180 at zenith.Returns the elevation provider used to retrieve the terrain elevation data.Methods inherited from interface com.luciad.tea.ILcdLOSPropagationFunction
applyForAzimuthSFCT, createLOSCoverageMatrix, initialize
-
Field Details
-
INVISIBLE
static final int INVISIBLEThe resulting value for points where the object is invisible.- See Also:
-
UNKNOWN
static final int UNKNOWNThe resulting value for points where the visibility is unknown. For example when no elevation data or invalid data was found at that point.- See Also:
-
-
Method Details
-
getEarthRepresentationMode
TLcdEarthRepresentationMode getEarthRepresentationMode()Returns the earth representation mode used by this instance.- Returns:
- the earth representation mode used by this instance.
-
getAltitudeMode
TLcdCoverageAltitudeMode getAltitudeMode()Returns the altitude mode indicating the definition of the resulting line-of-sight values.- Returns:
- the altitude mode indicating the definition of the resulting line-of-sight values.
-
getKFactor
double getKFactor()Returns the K-factor indicating the reflection of radar waves on the atmosphere. For radar computations, values should be greater than 1, usually 4/3. Setting the value equal to 1 will yield the same results as visual line-of-sight computations.- Returns:
- the K-factor indicating the reflection of radar waves on the atmosphere.
-
getMaxVerticalAngle
double getMaxVerticalAngle()Returns the maximum angle of the vertical extent in degrees, starting from 0 at the ground to 180 at zenith. It is the maximum vertical angle when the radar tilt angle is set to zero.- Returns:
- the maximum angle of the vertical extent in degrees.
-
getMinVerticalAngle
double getMinVerticalAngle()Returns the minimum angle of the vertical extent in degrees, starting from 0 at the ground to 180 at zenith. It is the minimum vertical angle when the radar tilt angle is set to zero.- Returns:
- the minimum angle of the vertical extent in degrees.
-
getMaxRadarTiltAngle
double getMaxRadarTiltAngle()Returns the maximum radar tilt angle in degrees, starting from 0 at the horizontal plane to 90 at zenith.- Returns:
- the maximum radar tilt angle in degrees.
-
getMaxRadarTiltAzimuth
double getMaxRadarTiltAzimuth()Returns the azimuth in degrees where the maximum radar tilt angle occurs.- Returns:
- the azimuth in degrees where the maximum radar tilt angle occurs.
-
getTerrainElevationProvider
ALcdTerrainElevationProvider getTerrainElevationProvider()Returns the elevation provider used to retrieve the terrain elevation data.- Returns:
- the elevation provider used to retrieve the terrain elevation data.
-