Class TLcdSphericalConstructiveGeometry
java.lang.Object
com.luciad.geometry.constructive.spherical.TLcdSphericalConstructiveGeometry
- All Implemented Interfaces:
ILcdConstructiveGeometry
ILcdConstructiveGeometry implementation for spherical topology. This implementation supports
the following shapes:
- ILcdPoint
- ILcdPolypoint
- ILcdPolyline
- ILcdPolygon
- ILcdComplexPolygon
- ILcdShapeList
- ILcdSurface (Outer and inner rings must be instances of ILcdPolygon)
- TLcdXYGeoBuffer
- TLcdLonLatGeoBuffer
- TLcdLonLatHeightVariableGeoBuffer
- TLcdLonLatBuffer
- TLcdLonLatHeightBuffer
- ILcdPoint
- ILcdPolyline
- ILcdPolygon
- ILcdComplexPolygon
- ILcdShapeList
- Since:
- 10.1
-
Constructor Summary
ConstructorsConstructorDescriptionTLcdSphericalConstructiveGeometry(double aRadius, double aTolerance) Creates a new TLcdSphericalConstructiveGeometry. -
Method Summary
Modifier and TypeMethodDescriptionconvexHull(ILcdShape... aShapes) Finds the convex hull of the given shape or shapes.difference(ILcdShape... aShapes) Calculates the difference of the given shapes.intersection(ILcdShape... aShapes) Calculates the intersection of the given shapes.symmetricDifference(ILcdShape... aShapes) Calculates the symmetric difference of the given shapes.Calculates the union of the given shapes.
-
Constructor Details
-
TLcdSphericalConstructiveGeometry
public TLcdSphericalConstructiveGeometry(double aRadius, double aTolerance) Creates a new TLcdSphericalConstructiveGeometry.
The tolerance allows the calculation to treat nearby points of the two different shapes, as if they are coincident. If the tolerance is too large, incorrect results can occur. The calculations are most stable if the tolerance is smaller than the length of the smallest line segment.
- Parameters:
aRadius- The radius of the sphere on which the geometry is defined, in meters.aTolerance- The tolerance in which points are considered equal, in meters.
-
-
Method Details
-
union
Description copied from interface:ILcdConstructiveGeometryCalculates the union of the given shapes. The resulting shape contains all points that are contained in any of the given shapes. The returned shape may be any type of shape, or a shape list of multiple shapes, depending on what is required to describe the resulting shape.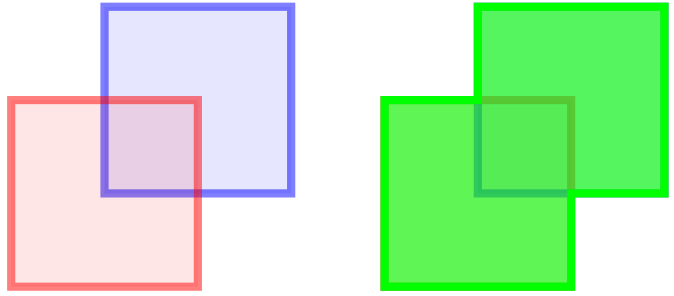
Red and blue shapes are the input shapes. The green shape is the result. - Specified by:
unionin interfaceILcdConstructiveGeometry- Parameters:
aShapes- The input shapes. There must be at least two shapes.- Returns:
- A shape representing the union of the input shapes
-
intersection
Description copied from interface:ILcdConstructiveGeometryCalculates the intersection of the given shapes. The resulting shape only contains points that are contained in all of the given shapes. The returned shape may be any type of shape, or a shape list of multiple shapes, depending on what is required to describe the resulting shape.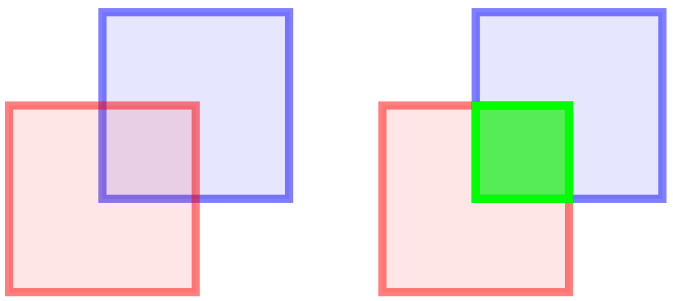
Red and blue shapes are the input shapes. The green shape is the result. - Specified by:
intersectionin interfaceILcdConstructiveGeometry- Parameters:
aShapes- The input shapes. There must be at least two shapes.- Returns:
- A shape representing the intersection of the input shapes
-
difference
Description copied from interface:ILcdConstructiveGeometryCalculates the difference of the given shapes. All next shapes are subtracted from the first shape. The returned shape may be any type of shape, or a shape list of multiple shapes, depending on what is required to describe the resulting shape.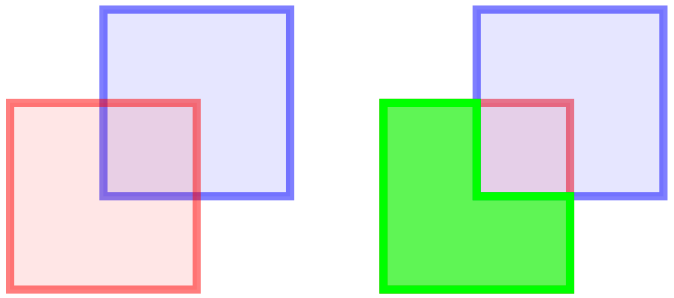
Red and blue shapes are the input shapes. The green shape is the result. - Specified by:
differencein interfaceILcdConstructiveGeometry- Parameters:
aShapes- The input shapes. There must be at least two shapes.- Returns:
- A shape representing the difference of the input shapes
-
symmetricDifference
Description copied from interface:ILcdConstructiveGeometryCalculates the symmetric difference of the given shapes. The resulting shape contains all points that are inside an odd amount of the input shapes. This can be compared to the XOR boolean operation. The returned shape may be any type of shape, or a shape list of multiple shapes, depending on what is required to describe the resulting shape.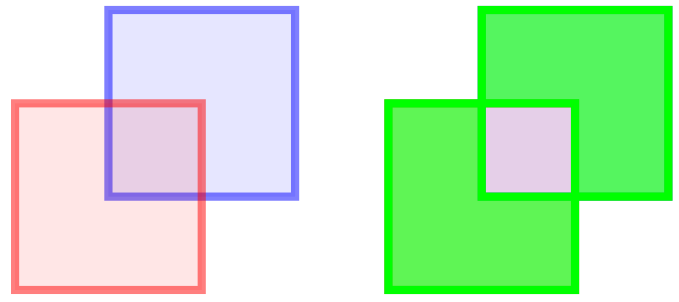
Red and blue shapes are the input shapes. The green shape is the result. - Specified by:
symmetricDifferencein interfaceILcdConstructiveGeometry- Parameters:
aShapes- The input shapes. There must be at least two shapes.- Returns:
- A shape representing the symmetric difference of the input shapes
-
convexHull
Description copied from interface:ILcdConstructiveGeometryFinds the convex hull of the given shape or shapes. The convex hull is defined as the smallest convex polygon that contains the shapes. If multiple shapes are given, the result is the convex hull around the points of all shapes together.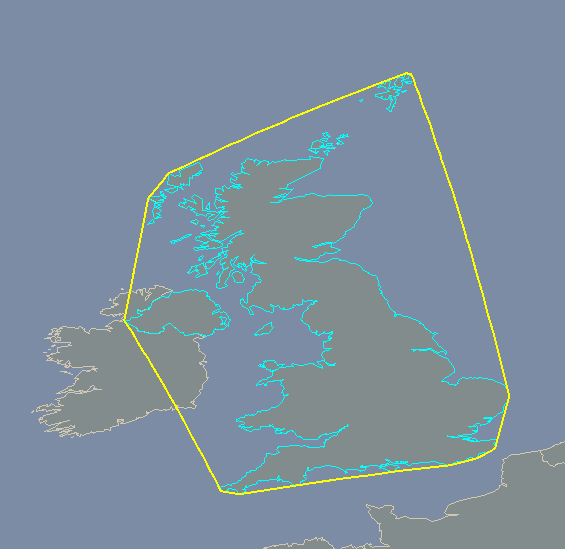
Convex hull of the United Kingdom. - Specified by:
convexHullin interfaceILcdConstructiveGeometry- Parameters:
aShapes- the shape or shapes for which to find the convex hull.- Returns:
- a shape representing the convex hull as a polygon.
-